

From the use of robots we expect an increase in efficiency in the use of resources, an optimized employement of labor, the possibility to conduct targeted interventions with improvement in quality. Here are some prototypes under study…
by Maria Luisa Doldi
The commitments required of agriculture in this millennium are enormous and are made even more difficult to reach by forces at play opposing to necessary development: we need to produce more, but there is a shortage of resources; world hunger must be eliminated, but the population is increasing; we need to produce more efficiently, but climate change is a cause of huge losses of food or arable land. In this context, making production systems as efficient as possible becomes an urgent need. The major thrust to the introduction of robotics in agriculture derives precisely from this necessity.
A rapidly evolving sector
Robotics applied to agriculture is a rapidly evolving sector as demonstrated by the new cases of successful applications: from milking robots to automated sowing, to the development of robots for precision agriculture (eg. automatic barn cleaning, collection, grooming, etc.). Research in this field is very active and among the most innovative projects for results, impact and organization, there is ECHORD++ http://echord.eu/experiments/agricultural-and-food-robotics/, financed by the European Union. It is a consortium, not a single project, that also finances, among other things, seven experiments under the scenario “Agricultural and Food Robotics”. One of the main features of ECHORD++ is the approach: the end user of machines and technologies is involved from the early stages of their research and development. This allows a more targeted application of research to practical use and enables innovation to pass “from the laboratory to the field”. But what did Echord++ deal with specifically as regards agriculture? In particular, the consortium has focused its attention on the robotization of the harvest. For example, the focus was on picking vegetables such as asparagus and cucumber, but, at the same time, developing systems that can easily be adapted to other types of products. Below are some examples of research in progress in the consortium ECHORD++. In some cases, these are machines still at the prototype stage, but they represent what robotics will soon offer to agriculture.

GARotics is a robot able to harvest green asparagus in a selective way, as soon as they reach the desired length. (Credits: ECHORD++)
[su_box title=”Future Prospects” box_color=”#43634b”]Researchers working on the various projects of the ECHORD++ consortium in the agricultural sector underline the importance of robotics to satisfy the food production necessary for the 21st century. Although agricultural robotics is more demanding than the industrial one ue to the several conditions in hich robots have to act, they agree in seeing a great potential for sophisticated and intelligent robots and equipment developments, including sensors and intelligent controls. This will give rise to positive impulses for a more rapid development of robotics, both in agriculture and, by reflection, in industry. In this sense, agricultural robotics could lead the way for many applications, even in the industrial sector.[/su_box]
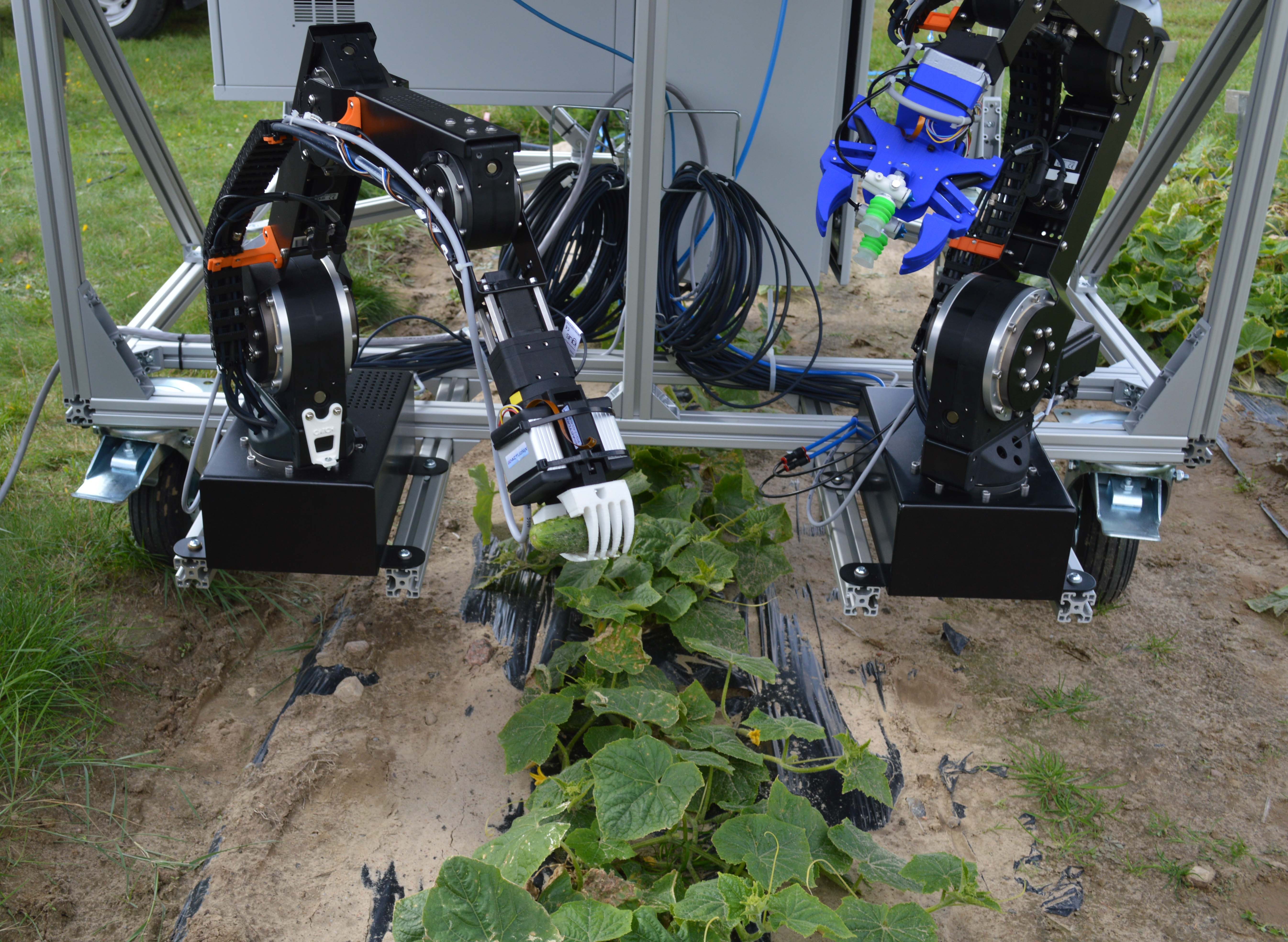
CATCH was born to pick cucumbers but it may also be adapted to other products such as zucchini, lettuce, strawberries. (Credits: ECHORD++).
Towards the automation of the harvesting of green asparagus
GARotics is an acronym for Green asparagus harvesting robotic system and is one of the projects in progress in the ECHORD++ consortium. The aim of the project is to create a robot that is able to harvest green asparagus in a selective way, as soon as they reach the desired length. It is a process that normally requires human intervention in order to leave the smaller asparagus intact. It is, in addition, a demanding and hardworking process, which exposes agricultural operators to labor shortages and high production costs. While for the cultivation of green asparagus the degree of automation is quite high, automation of the harvest is, on the contrary, still an unsolved challenge. Different approaches for automated machines have been implemented in the past, but none of the known automated harvesters can assure the same harvesting rate and quality of the manual harvesting. The difficulty of harvesting automation lies above all in the complexity of asparagus detection. In the project that led to the realization of GARotics this background has been considered. For this reason, GARotics aims specifically to refine the automatic harvesting systems for green asparagus, improving the detection rate and the harvesting speed. Moreover, GAROTICS presents a new gripping mechanism with three robotic arms. Finally, every harvesting cycle produces data used to support yield forecast and the overview of the following cycle. Now, how does GARotics work in the field? «The Garotics harvesting machine works with two harvesting tools that are moved to appropriate positions with respect to the asparagus stems. These positions are provided by a camera system. All known harvesting machines for green asparagus work with fixed tool positions or with a row of fixed tool heads and mechanical sensors to detect the stems. The machine moves along the row of asparagus and detects any stems with a 3D camera system. When the system detects an asparagus with minimum length and diameter, its position is calculated and one of the harvesting tools moves to this position. When the instrument is located directly above the asparagus stem detected, the harvesting process is started. The instrument oscillates, grabs and cuts the stem at the same time, moving the stem upwards, imitating human movement. The instrument then moves towards the side of the machine and drops the stem into a box» explains Matthias Kinzel, of the company Strauss Verpackungsmaschinen GmbH which participates in the project. The GARotics machine is still in the prototype phase. Field tests have proved the reliability of robotic selective harvesting and the machine can operate in different environmental conditions, an important aspect if we consider the short seasonal harvesting times. The project succeeded in proving that with automated harvesting it is possible to accelerate the effective and precise harvesting of asparagus. The technological challenges for further development are the different lighting conditions, the reliable identification of weeds among the asparagus stems and the linear movement of the machine along the row of asparagus without losing efficiency. General mechanical reliability and ease of use must also be improved.
GAROTICS presents a new grip mechanism that harvests the asparagus mimicking human movement.
(Credits: ECHORD++).
For an easier harvest of cucumbers
Manual harvesting of cucumbers is a labor-intensive operation. Depending on the technique used, the working conditions can be really hard and not very ergonomic. Therefore, automating the harvest means, in this case, also relieving labor of heavy work, in difficult conditions. The CATCH project, this too carried out by the ECHORD++ consortium, explores new, lightweight, modular and economical, yet solid multi-arm robot systems, built with standardized components, that provide economical bases and use cases for agricultural applications. The objective of CATCH is the development of a solution of a flexible, economical and reconfigurable/scalable outdoor agricultural robot for automated harvest in difficult environmental conditions, facing critical problems such as the display of fruits and fast harvesting actions. The use case of outdoor cucumber harvesting has been selected considering the needs of the end users concerned, the technological challenges and the economic impact in various European regions. «Of course – explains Dr. Dragoljub Surdilovic, head of the project at the institute Fraunhofer IPK – we work simultaneously to expand the possible use of CATCH to other types of vegetables, such as zucchini, lettuce, strawberries». Also CATCH is at a prototype level and for now the main problems such as the recognition and localization of cucumbers and their detachment from the plant have been solved. However, some critical points still remain: the prototype still does not reach a high percentage of ripe fruit harvesting and the detachment from the plant does not yet occur in an optimal way. «We have very strict objectives, for example we aim to achieve a 100% percentage of ripe fruit harvest and we wish 100% of the petioles to remain on the plant. They are very stringent requirements, so we had to develop new models, new component, new automation systems compared to what is available on the market. Moreover, in the recognition of this particular product the colorimetric analysis is of little help, considering the color of the cucumber, difficult to differentiate from that of the leaves» explains Dr. Dragoljub Surdilovic. A greater speed of movement and of recognition percentage are the two points still to be optimized.


